On my journey to make my commute through the city quicker and more fun, I fell in love with riding two wheels. After modifying a few scooters and gas bikes, I was researching quieter options and found the GNG Electric mid-drive kit, a highly moddable electric bike kit that was starting to gain popularity over on the Endless-Sphere forums. Members of the E-S community were pushing this 450w kit to 2000w (nearly 3HP) and beyond, which didn’t convince me at first since my modified scooter did over 10HP on the dyno, but then Adam Mercier posted a video of what he was up to with his GNG kit:
I quickly ordered a kit for myself, and began scouring craigslist for an appropriate freeride bike to convert.
Almost immediately, the power attainable by this highly under-rated kit (the motor used in the 450w kit had been sold as a 1000w cargo trike motor prior to the GNG’s creation) was giving me problems. At 2000w, the primary belt reduction was running way out of spec, since I increased both the amp draw and the operating voltage of the motor using a programmable speed controller and more batteries, the belt reduction was running too fast, and with too few sprocket teeth getting engaged for the given torque load. My solution was to increase the size of the small primary sprocket with a 3d printed sleeve:
This worked great at 2000w, the mod increased my top speed and eliminated belt skip, but the temperature sensor I installed in the motor was telling me I should try running more amps, and more voltage. So I reprogrammed the controller, and doubled my battery pack to 28 LiPo cells running in series for a peak voltage of 117v.
At these speeds, the 3d printed sprockets would only last a few rides before getting chewed up or exploding, so I converted the primary gear reduction to #25 chain:

This fixed the primary chain drive, and allowed me to achieve an even higher gear reduction, which meant more torque! But more torque meant more load on the secondary reduction: I was now constantly dropping the secondary chain as the stronger shock load was no match for the stock chain tensioner. And worse yet, I was bending my bottom bracket constantly from the torque of the motor combined with the sweet jumps this bike was now capable of.
So I sourced a heavy duty ISIS freewheeling bottom bracket from cyclone-tw.com, and added some reinforcement to LightningRods’ adjustable jackshaft mounting kit in order to remove the need for a chain tensioner:
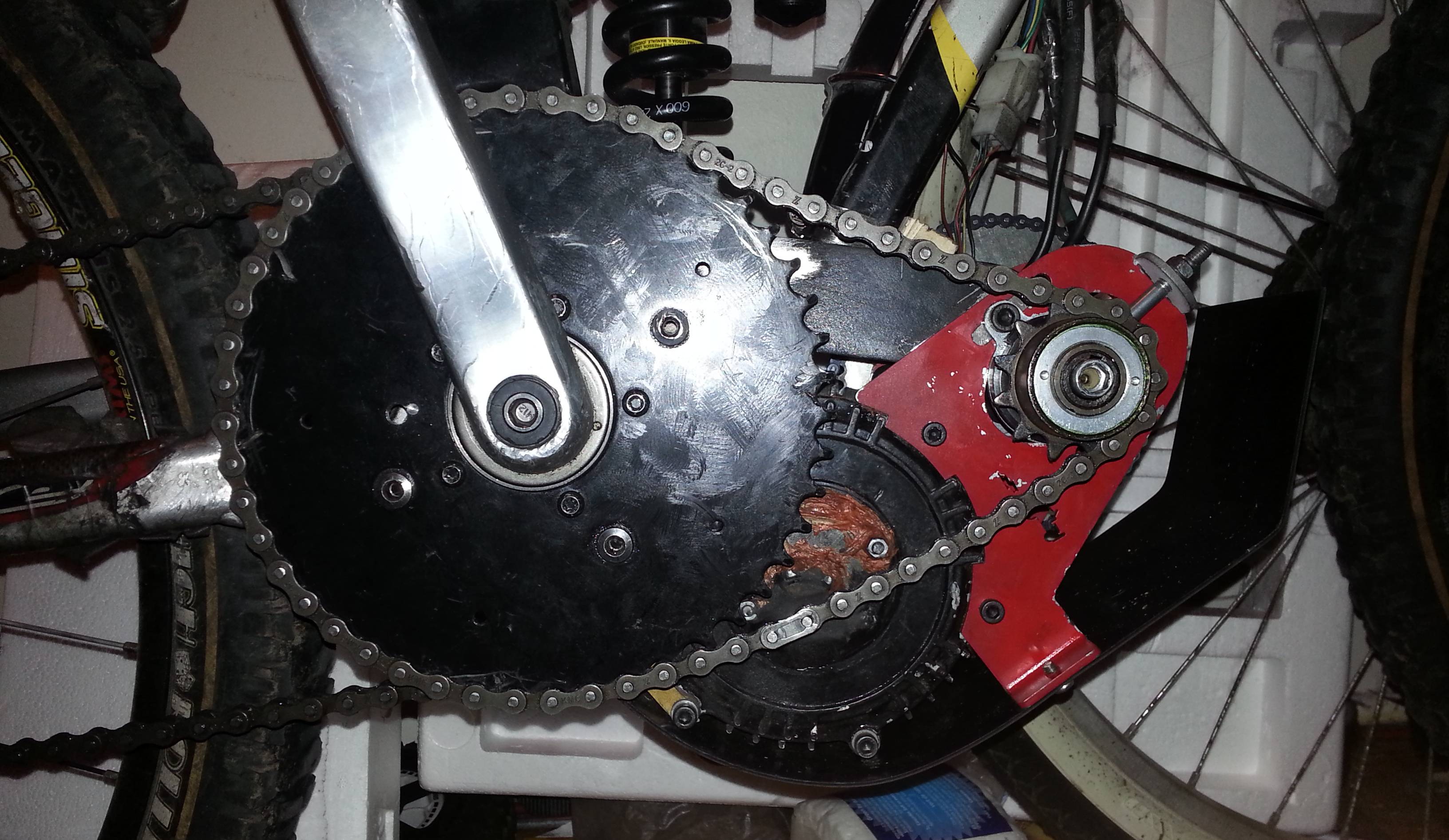
And I succeeded yet again at pushing the problem further down the chain-line. Now that the motor reduction could handle higher power, the rest of the bikes drive-train started to slowly break down. The final drive chain kept slipping and falling off, resulting in the derailleur getting pulled into the motor:

This was resolved with a chain guide, the commercially available options were small for the big 48T chain ring I was using on the bottom bracket, so I designed a 3D printable one in Sketchup that can work with any chain ring size:

I also modified the rear derailleur to hold a big pulley for keeping chain tension, and configured the final drive to use thicker BMX chain & sprockets:

The controller is now configured to pump out 40A for a total of 4500W running through the stock motor. The motor gives me about 20 minutes of power when fully loaded at 4500W before the temperature climbs to over 100°C, and stays below that in average city traffic. 4500W is only about 6HP, but with the final weight of the build at around 70lbs, this bike is much more nimble than the 2oolb scooter, and still tops out at 80km/h, which is only a few km slower than the scooter.
Read more details in my build log on Endless-Sphere:
https://endless-sphere.com/forums/viewtopic.php?f=28&t=50946